Mit zunehmender Besiedlungsdichte, nimmt auch der Anteil der am Straßenrand geparkten Fahrzeuge zu. Dabei stellt sich das Problem, dass jedes Fahrzeug in einer Reihe für sich genügend Abstand zum Ausparken halten muss. Außerdem parken häufig kleine Autos in zu großen Parklücken.


Wir haben ein Mobilitätskonzept entwickelt, mit dem es parkenden Fahrzeugen möglich ist, den Platz auf Parkstreifen besser zu nutzen. Unsere Fahrzeuge sprechen sich untereinander ab und schaffen sich bei Bedarf gegenseitig Platz, sodass der benötigte Raum zum Ausparken auf den gesamten Parkstreifen verteilt werden kann.
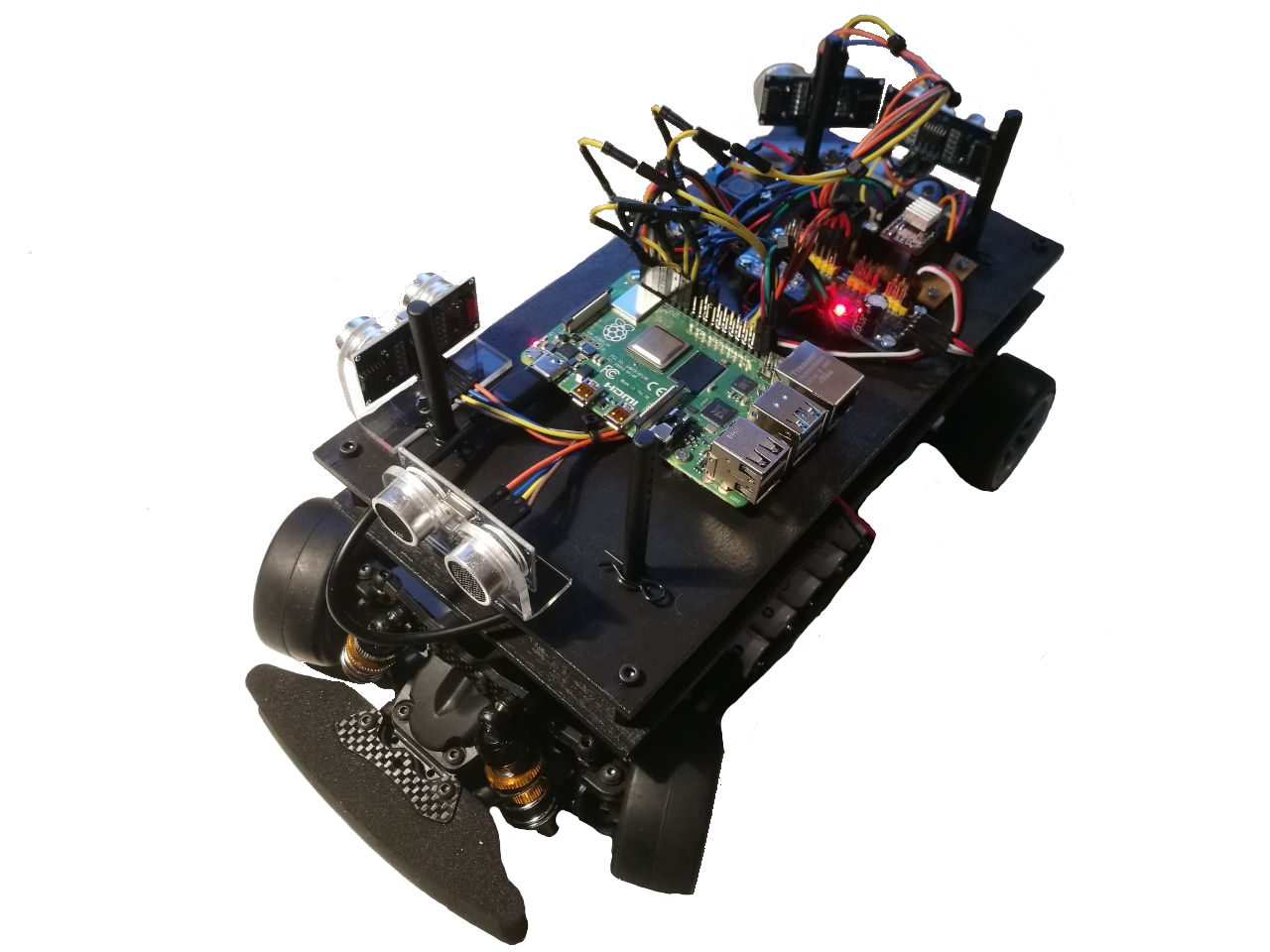
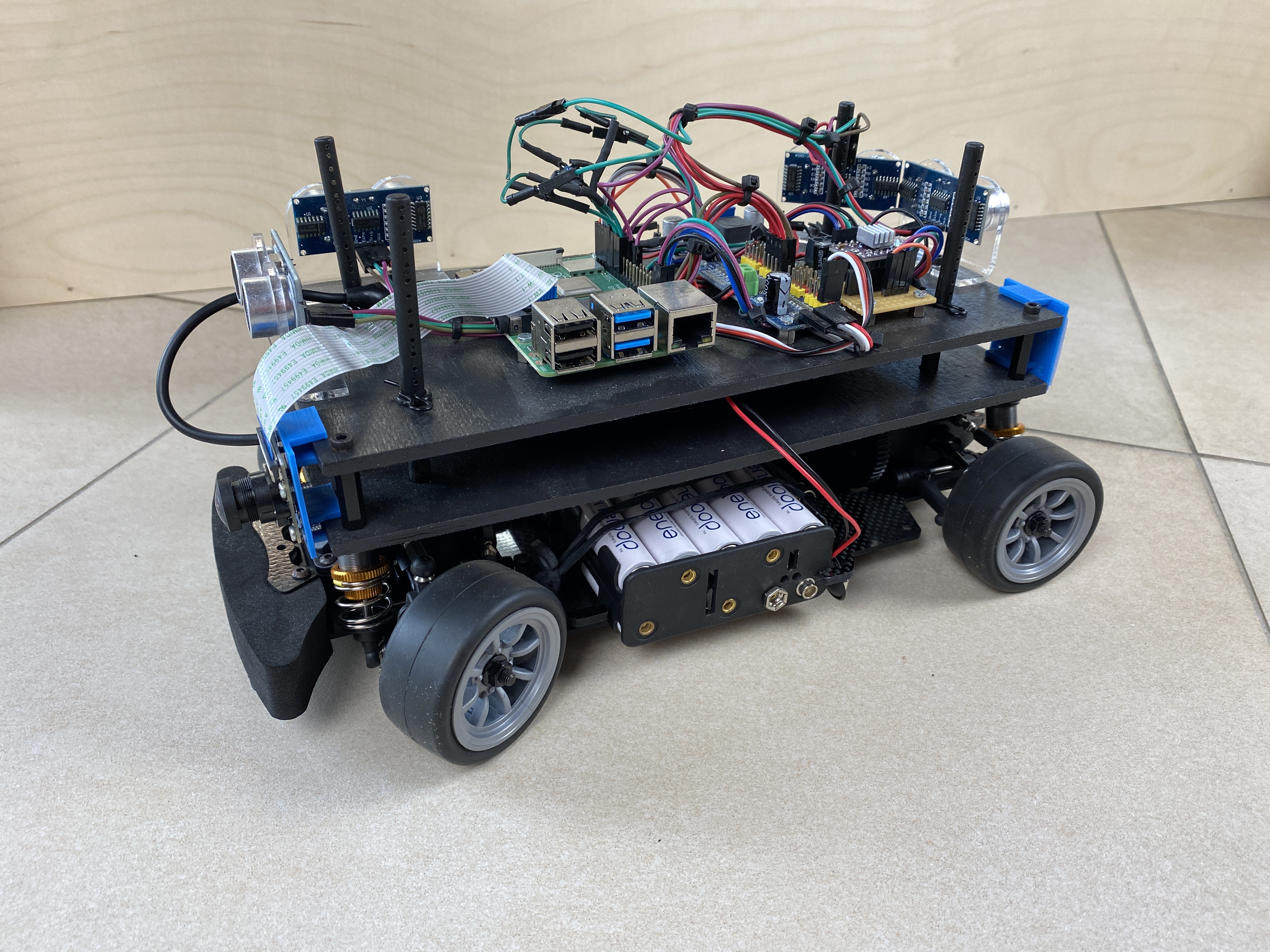
Im Rahmen dieses Projektes haben wir Prototypen von Fahrzeugen entwickelt, die sich selbstständig miteinander verbinden und intelligent aufeinander reagieren. Unsere Fahrzeuge sind nach Erreichen des Fahrtziels dazu in der Lage, mit Hilfe von Abstandssensoren einen freien Parkplatz am Straßenrand zu finden und autonom darin einzuparken. Auf dem Parkstreifen halten die Fahrzeuge dann genau so viel Abstand, dass der auf den Parkstreifen verteilte Abstand insgesamt dazu ausreicht, dass das längste Fahrzeug der Kette jederzeit ausparken kann. Um das zu garantieren, tauschen die Fahrzeuge innerhalb eines lokalen Netzwerks fortlaufend Informationen über ihre Anordnung und ihre Absichten aus.
Damit minimale Abstände gehalten werden können und trotzdem alle Fahrzeuge dazu in der Lage sind, den Parkstreifen zu verlassen, kooperieren die Fahrzeuge auch beim Ausparken. Dazu schaffen die Fahrzeuge um das ausparkende Fahrzeug herum Platz, indem sie autonom vor bzw. zurück rücken. Erst dann kann ausgeparkt werden, woraufhin die übrigen Fahrzeuge wieder platzsparend zusammenrücken.
Unsere Fahrzeuge erstellen automatisch Netzwerke, über die sie sich miteinander verbinden und Daten austauschen können.
Unsere Fahrzeuge parken nicht nur autonom ein und aus sondern kommunizieren und kooperieren auch autonom miteinander.
Das kommunikative und kooperative Verhalten unserer Fahrzeuge resultiert in einem intelligenten Schwarmverhalten.
Die Ergebnisse dieses Projekt präsentieren wir in einer wissenschatsprpädeutischen Arbeit, in der wir die konzeptionelle und technische Entwicklung des Systems und der Prototypen detailliert darstellen. Mit dieser Arbeit nehmen wir am Wettbewerb Jugend Forscht 2021 teil.
ist für die Implementation der Fahrzeug-Software verantwortlich.

ist für die Konstruktion der Modellfahrzeuge verantwortlich.

ist für die Gestaltung der Kommunikationsschnittstelle verantwortlich.